- We care about more than 1-D and 2-D problems
- We need tools for more complex positions & motion
- This is where reference frames come in
Basics
- A Reference Frame is a set of basis vectors which we used to describe our problem
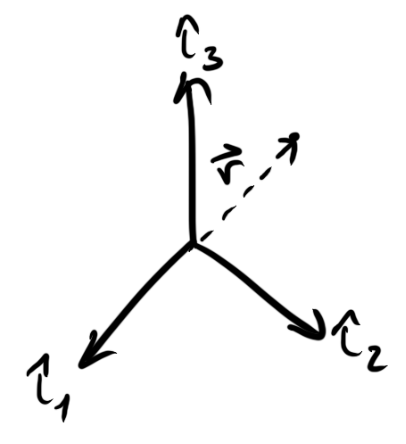
- Imagine an arbitrary reference frame, I:
- For r in the I frame:
- We can also make a new frame, E:
-
E={e^1,e^2,e^3}, where e^2≡r
- r in this new frame:
-
Er=0e^1+9e^2+0e^3=9e^2
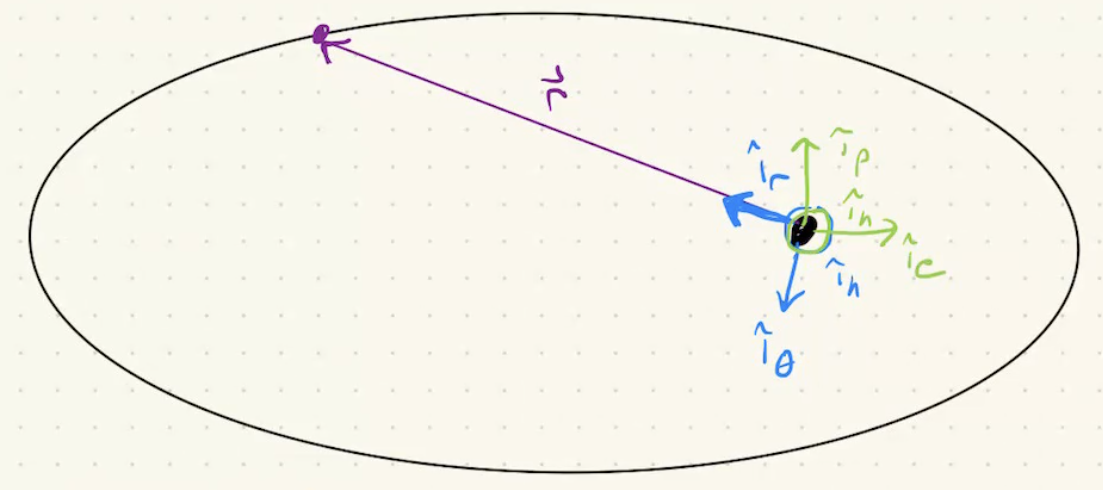
Orbit Frame
-
O={i^r,i^θ,i^h}
-
Or=ri^r
- Pro: Very easy to represent position
- Con: Hard to represent velocity
- Have to do partial derivatives, as components of the position vector depend on each other
-
dtd(Or)=r˙i^r+rdtd(i^r)
Perifocal Frame
- Alternative to Orbit Frame
-
P={i^e,i^p,i^h}
- Unfortunately, position vector looks ugly D:
- However, velocity vector is easily calculable in this frame :D
-
PrPv=r(cos(θ)i^e+sin(θ)i^p)=1+ecos(θ)p(cos(θ)i^e+sin(θ)i^p)=dtd(Pr)=pμ(−sin(θ)i^e+(e+cos(θ))i^p)
Types of Reference Frames
Non-Inertial
- Rotating frame
- Basis vectors are constantly changing
- Example: Orbital Frame
Inertial
- Non-Rotational Frame
- Basis vectors don’t change
- Example:
- Perifocal Frame
-
i^et=0=i^et=t0+Δt
Reference Frames for Earth
-
Ee^3e^1e^2={e^1,e^2,e^3}=Rotation Axis of Earth and Pole=Equator+0∘Longitude=e^3×e^1
- E is the Earth Centered, Earth Fixed (ECEF) Reference Frame